BSpline_Active_Contour
2D and 3D Active contours using BSplines
About
This project was built as part of my masters thesis at University College London.
The code is free to be used, modified, and distributed as per the MIT license.
This is far from a finished product, and some of the classes included have shown very limited results. This repository is here so other can review and potentially build upon this current implementation.
The paper will be added to this repository as a file or a link at a future date.
Installation
The package was tested from a base Anaconda installation using python 3.7, but should work on any python 3 installation. Using the included setup script, the package can be installed with pip from the base folder:
pip install .
How the package is organized
This is mainly for those reviewing the code.
The package is organized in three subsections:
- geometry: containing all extensions to the NURBS-Python library and preset geometries.
- utils: containing data manipulation classes, plotting functions, Gradient Vector Flow algorithms
- optimize: the main point of interest, with a “solvers” module containing parent classes, and each method (2D, 3D, force model, hybrid model) each in their own module.
Examples for each strategy can be found in the examples folder, including gradient vector flow, accompanied by their testfiles. These are meant to be run from the examples folder after installation (including using it as the working directory, which is default behavior).
cd examples
python "[SCRIPT_NAME].py"
The scripts are split as follows:
2D Solver:
- solver2d.py
- “performance - traditional vs bspline.py”
Hybrid Solver:
- “aortic_cross-section - hybrid_snake.py”
- “generated_tube - hybrid_snake.py”
3D solver (limited usefulness, run as a second pass after the hybrid solver):
- “aortic_cross-section - hs & 3d.py”
- “generated_tube - hs & 3d.py”
Force Analog Solver (non-functional):
- “[non-functional] force_analog_model.py”
Gradient Vector Flow:
- GVF.py
Hybrid Snakes
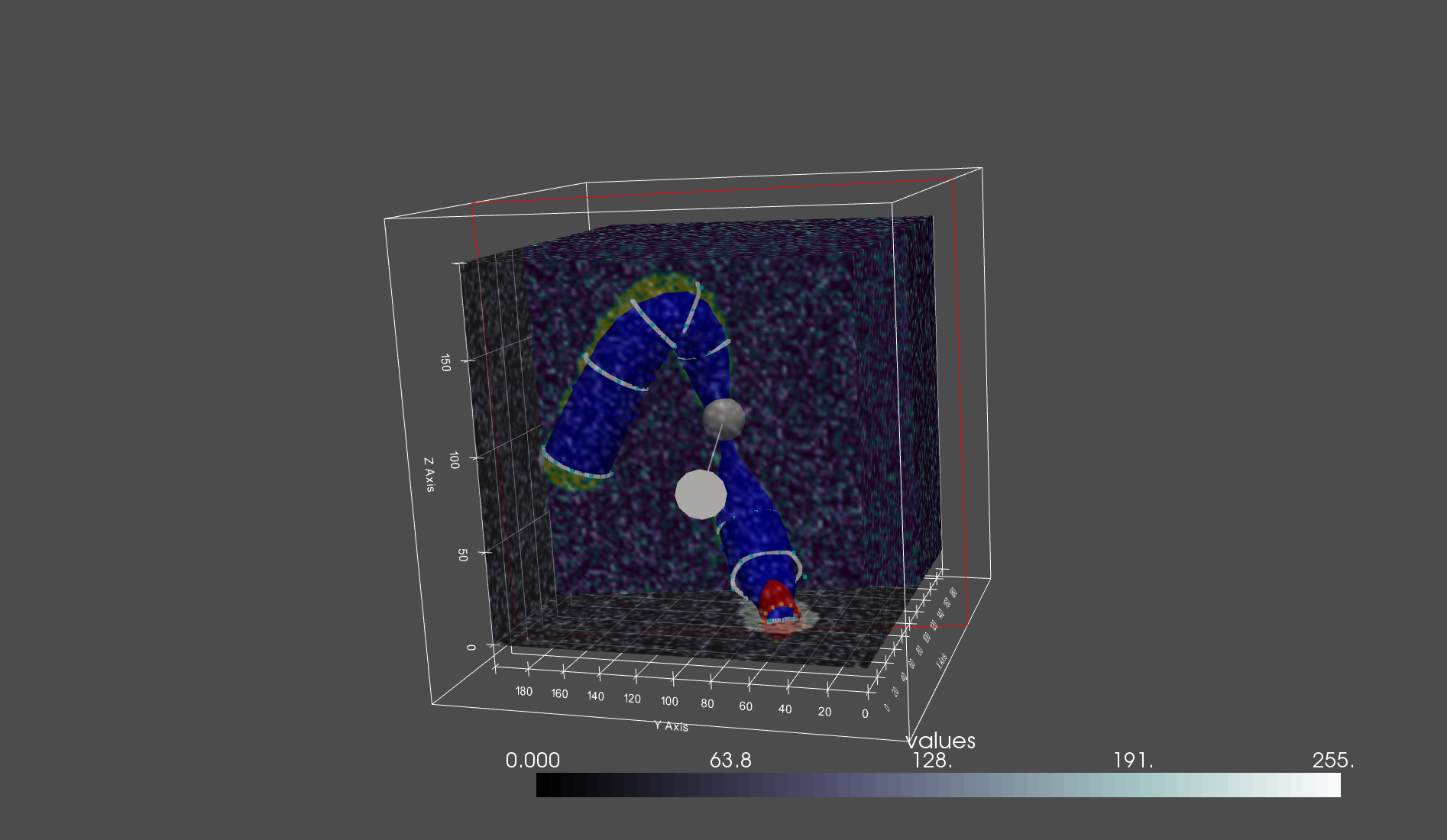
The main output of this dissertation is a hybrid snake which solves the contour problem across 2D slices but then extrapolates the results to 3D.
To use hybrid snakes, simply initialize the input spline:
# Set input spline geometry
x = [50, 50, 50]
y = [50, 50, 50]
z = np.linspace(0, 99, 3)
array = np.stack([x, y, z])
Start by loading your wanted file or file directory (don’t forget the trailing slash so it recognizes directories, the string may need to be raw bytes).
# Import the data
file = "testfiles/spline_tube_dataset_noisy.gif"
imseq = ImageSequence(file)
imseq.change_resolution((200, 200, 200))
Now initialize the solver with the image sequence, the spline input, and other parameters you may want to include.
The value “n” is the number of slices, plane extent and shape are how large the planes are, and the resolution in the plane’s x/y coordinates.
Other values can be passed to the solver
# Create a bspline hybrid solver
hs_bspl = HybridSnakes(imseq, array,
plane_extent = (100, 100),
plane_shape = (100, 100),
n=6,
snake_type = 'bspline'
)
The default parameters are:
# interpolation
fill_value = 0
# slicing
plane_shape = (100, 100)
plane_extent = (100, 100)
# input snake geometry
init_spline_size = 20
num_points = 50
# snake type
snake_type = 'active_contour'
gaussian_smoothing = 3
# active contour parameters
active_contour_options = {
"alpha": -0.015,
"beta": 100,
"gamma": 1E-2,
"w_edge": 1E6,
"max_iterations": 10000,
"boundary_condition": "periodic",
"convergence": 0.01,
}
# BSpline Snakes
bsnake_opts = {'maxiter': 50, 'disp': True, 'gtol': 1E-2}
bsnake_opts_tol = 1E-5
bsnake_num_ctrlpts = 10
bsnake_lambda = [1E-2, 1E-5]
Once you have chosen your parameters (the default ones are the ones I had the most success with when testing across datasets), you can optimize the slices:
# %% optimize along slices
snakes = hs_bspl.optimize_slices()
And plot:
hs_bspl.plot(plane_widget=True)
Other 3D solvers
Examples are included for all the solvers considered in the “examples” folder. These were not as successful and in the case of the force analog model is simply not behaving the way I would like it to. These are still included in the examples, but expect limited results.